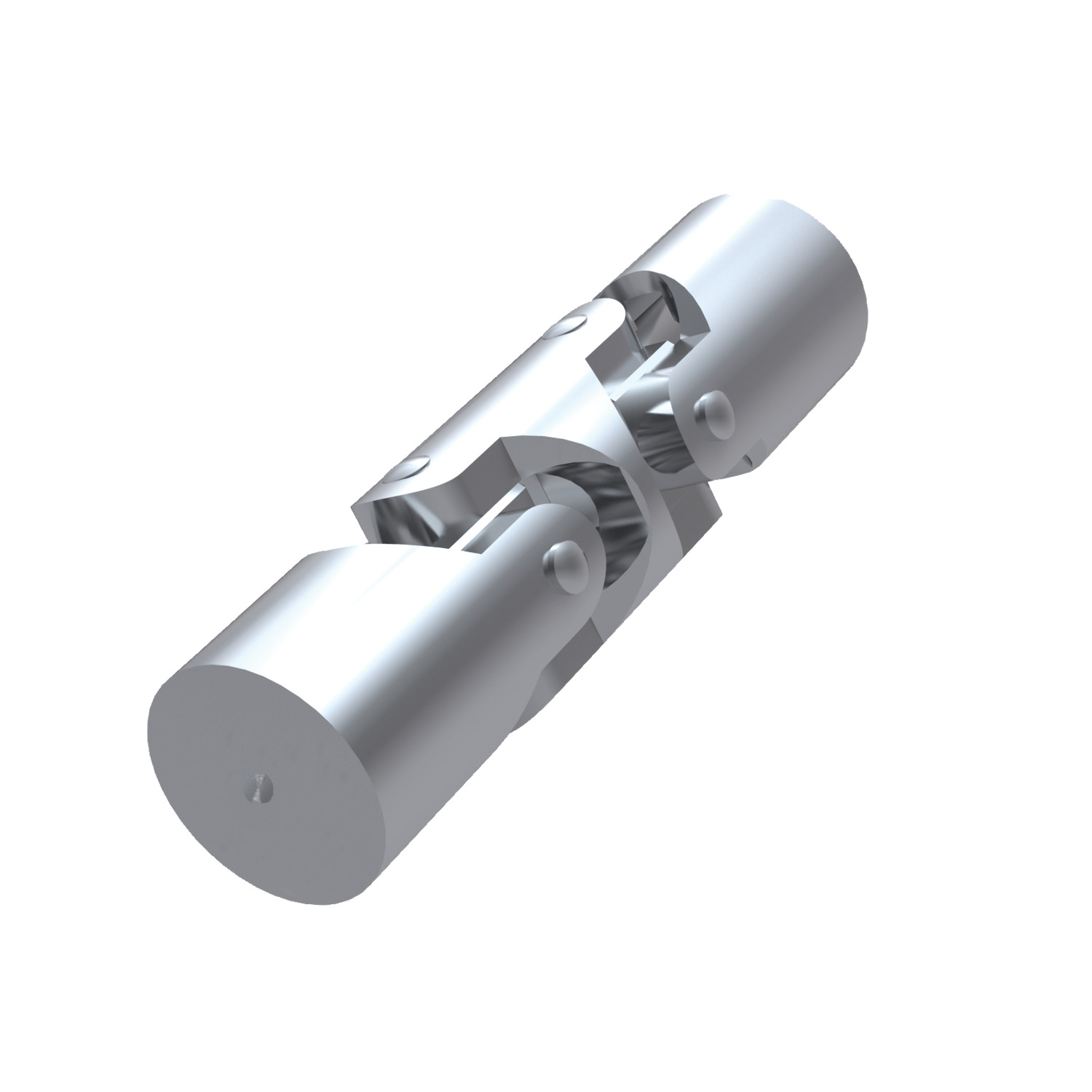
Universal Joints from Automotion Components
A universal joint is a solid coupling that allows two rotating shafts to be connected together. The bearing in the universal joints allow the transmission of torque and rotary motion of two shafts that are not aligned to each other. They have a maximum operational bending angle per bearing of 45 degrees and come in steel and stainless steel with protection bellows to stop the ingress of dirt in the bearings.
Our extensive range of universal joints include plain bearing and needle roller bearing variants, pre-bored or unbored options, single universal joints, double universal joints, telescopic universal joints in steel and stainless steel. Bores can be round, keywayed, square or hexagonal shaped and we can manufacture specials to your drawing.
Our extensive range of universal joints include plain bearing and needle roller bearing variants, pre-bored or unbored options, single universal joints, double universal joints, telescopic universal joints in steel and stainless steel. Bores can be round, keywayed, square or hexagonal shaped and we can manufacture specials to your drawing.



A universal joint is a solid coupling that allows two rotating shafts to be connected together. The bearing in the universal joints allow the transmission of torque and rotary motion of two shafts that are not aligned to each other. They have a maximum operational bending angle per bearing of 45 degrees and come in steel and stainless steel with protection bellows to stop the ingress of dirt in the bearings.
Our extensive range of universal joints include plain bearing and needle roller bearing variants, pre-bored or unbored options, single universal joints, double universal joints, telescopic universal joints in steel and stainless steel. Bores can be round, keywayed, square or hexagonal shaped and we can manufacture specials to your drawing.
To make an order, to inquire about anything regarding your application and what we could offer or to just have a browse, please do not hesitate to contact us and speak to our knowledgable and friendly team members.
Universal Joints Options
Single Universal Joints

Single universal joints, unbored with solid ends. Manufactured to DIN 808. Maximum bending angle of 45°. Used where shafts off-set towards each other.

Single universal joint with plain bearing, manufactured to DIN 808, typically smaller OD and longer than comparative bore size of R3689.

Stainless steel single universal joint. Manufactured to DIN 808. Maximum bending angle of 45° per joint. Round bore and keyway available.

Stainless steel single universal joint with solid ends for end user to machine their own custom bores.
Double Universal Joints
Solid end double universal joints allow the end user to either weld to existing shafts or bore out to exact requirements.

Double universal joint typically smaller OD and longer than comparative bore size of R3685.

Free cutting steel universal joints, plain bearing (DIN 808 standard). Maximum bending angle of 45° per joint. Used where large bending angles are required.

Stainless steel double universal joints. Manufactured to DIN 808. Maximum bending angle of 45° per joint. Round bore and keyway available.
Telescopic Universal Joints

Telescopic universal joints are used when two shafts that need connecting are positioned when, for example, a standard universal joint is too small to reach.

Stainless steel telescopic universal joint used when two shafts that need connecting are too far apart for a standard universal joint is too small to reach.
Two universal joints connected by a sliding splined shaft with the abilityto extend; allowing adjustments in length during installation.
Protection Bellows

Bellows available for single universal joints. They allow full protection against ingress of dirt. Can be filled with grease for long term lubrication.

Protection bellows specifically for double universal joints. They allow full protection against ingress of dirt.
Overview

Single Universal Joints
Available with plain bearings or needle roller bearings. Plain bore and keyed bores stocked as standard, hex or square shaped bores on request. Bore diameters 6mm up to 50mm.

Stainless Steel Universal Joints
Single and double universal joints with plain bearings and plain bores. Keyed or hex or square shaped bores available on request. Bore diameter 6mm up to 30mm.

Double Universal Joints
Available with plain bearings or needle roller bearings. Plain bore and keyed bores stocked as standard, hex or square shapped bores on request. Bore diameters 6mm up to 50mm.

Quick Release Universal Joints
Quick charge mechanism one end of the joint to allow rapid connection and release of the shaft, ideal when time is critical. Bore diameters 8mm up to 30mm.

Telescopic Universal Joints
Two universal joints connected by a sliding splined shaft with the ability to extend, allowing adjustments in length during installation. Bore diameters 10mm up to 30mm.

Universal Joint Bellows
Available for both single and double universal joints, bellows are used to cover and protect the joints. Available to protect joints up to 58mm outside diameter.
When one single joint is coupled with two shafts (of which the driving one is rotating at a constant speed) forming an angle, a periodic variatiom of the driven shaft is caused with exactly four fluctuations per revolution.
The difference between the maximum and the minimum speed of the driven shaft depends on the angle formed by the two shafts. The difference grows with an increase of the angle a°. To have homokinetic transmission, either two opposite single joints (ensuring that the two central yokes lie on the same plane and the angles are equal) or double joint need to be fitted. The irregularity caused by the former articulation is cancelled by the latter. The overall length resulting from the coupling of the two single joints can be reduced by using a double joint. In other words, the double joint is to be considered as the shortest homokinetic transmission.
For low speed applications(Max. 1000 rpm), joints with plain bearings (rubbing bearings) are suggested. They are able to support shock loads, motion reversals, irregular runnings and relatively high torques. The working angles must be restricted when using at speeds between 500 - 1000 rpm. Please consult our technical department if you have such an application.
For high rotation speeds, relatively low torques or wide angles, joints with needle roller bearings are preferred. They can reach 4000 rpm dpendent on the angle.
How to Install Universal Joints
Dynamic basic load ratings of plain bearing rod ends

To obtain a uniform rotary motion always use either two opposite single joints or one double joints
a1 = a2.

The pillow blocks supports should be positioned as close as possible to the joints.

When using two opposite single joints ensure the alignment of the inside yokes.

In extensible transmissions make sure that the arrows are perfectly aligned.

It is essential that the two bending angles a° are equal.

How to Read Diagrams
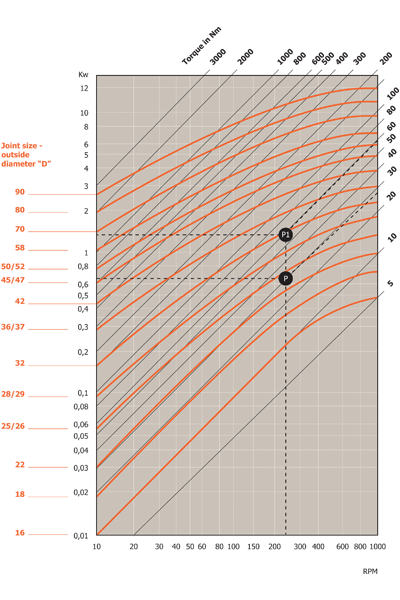
The joint capacity to transmit a regular torque at a constant load with no shocks, for a long period, mainly depends of the number of revolutions per minute and the inclination angle a° of the two axes. The diagram on the following pages are based on this. Each curve corresponds to the joint size (outside diameter "D") and represents the torque that the joint can transmit depending on speed and working angle a°.
The diagrams can be directly read if angle (a°) is 10°. For wider angles, torques are reduced, therefore these are to be corrected using the correction vales (F) relating to the angle shown in the table.
Important Note:
Diagrams' values are merely indicative and refer to the single joints only. When choosing a double joint, you have to consider that they can transmit a torque about 10% lower than the same sized single joints. Each application has its own particular motion characteristics, such as: shock loads, motion reversals, connected masses, kind of starting presence of elastic joints, stops and starts, etc..., that have to be considered when choosing the joint.
Working angle a° | Correction value F |
| 5° | 1.25 |
| 10° | 1.00 |
| 15° | 0.80 |
| 20° | 0.65 |
| 25° | 0.55 |
| 30° | 0.45 |
| 35° | 0.38 |
| 40° | 0.30 |
| 45° | 0.25 |
Example
Known:
Power = 0.65 kW
RPM = 230
With working angle a°, F = 1, we get point P. Torque = 27Nm corresponding to joint size "D" = 25/26mm = Types R3688.016 and R3689.012
With working angle a 30°, F = 0,45 (kW 0.65: 0.45 = 1.44 kW) we get point P1 Torque = 60 Nm corresponding to joint size "D" = 32mm = Types R3688.020 and R3689.016
Consider that:
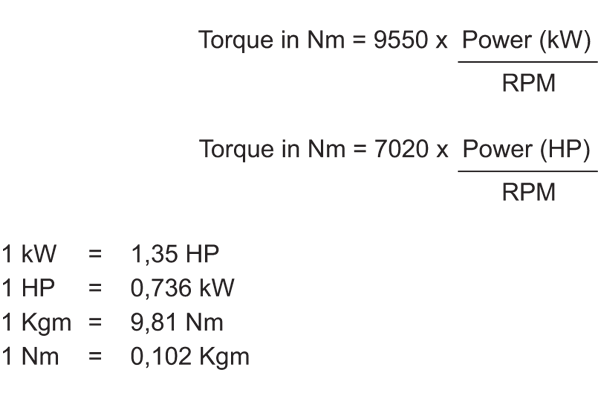
Torque Ratings for Plain Bearing Universal Joints
FAQs
What are Universal Joints used for?
Universal joints are an important industrial component typically used in many machines in which there are long rotating shafts. Available in single and double joint variations, popular applications include control mechanisms, medical devices, electronics, Instrumentation and textile machinery. Corrosion resistant, and with negligible backlash, universal joints are ideal for high-speed operations.
What are the advantages of using Universal Joints?
Using universal joints offers many benefits and advantages, particularly when there is a need to facilitate torque transmission between shafts which have angular misalignment. Universal joints are simple to assemble and dismantle whilst torque transmission efficiency is high.
What is the difference between single, double and telescopic Universal Joints?
Single joints generally operate at larger angles and higher torques than other types of couplings and can compensate an angular offset of up to 45°. Double universal joints offer the capacity to compensate parallel misalignment and can be created from two single joints by binding the hubs together. Finally, telescopic universal joints are essentially double joints with a section in the center that permits a flexible length of the centerpiece. The adjustable center element enables the shaft's length to be varied to compensate for axial play or easier installation.